Tópico 1- Veículos Autónomos
Utilizar veículos autónomos para aquisição sistemática de dados físicos do oceano
DRIP - Mapeamento de Plumas no Rio Douro
Águas de plumas fluviais de relativa baixa densidade permitem que a sua expressão de superfície seja observada tanto em imagens de satélite como em imagens aéreas. O acesso a imagens de satélite, no entanto, impõe uma latência entre a captura e a disponibilidade (de várias horas) que, combinada com os movimentos das marés e a dinâmica costeira do oceano, impede o seu uso para mapear a evolução da frente. As imagens disponíveis nem sempre são úteis devido à cobertura de nuvens e os dados representam apenas uma camada de água superficial. A estrutura 3D subaquática da pluma, a sua espessura e variabilidade continuam a ser objeto de modelação. Como tal, no contexto do projeto MARINFO, cientistas do CIIMAR e LSTS desenvolveram algoritmos para detetar e mapear plumas de rios de forma autónoma usando medições in-situ feitas por AUVs.
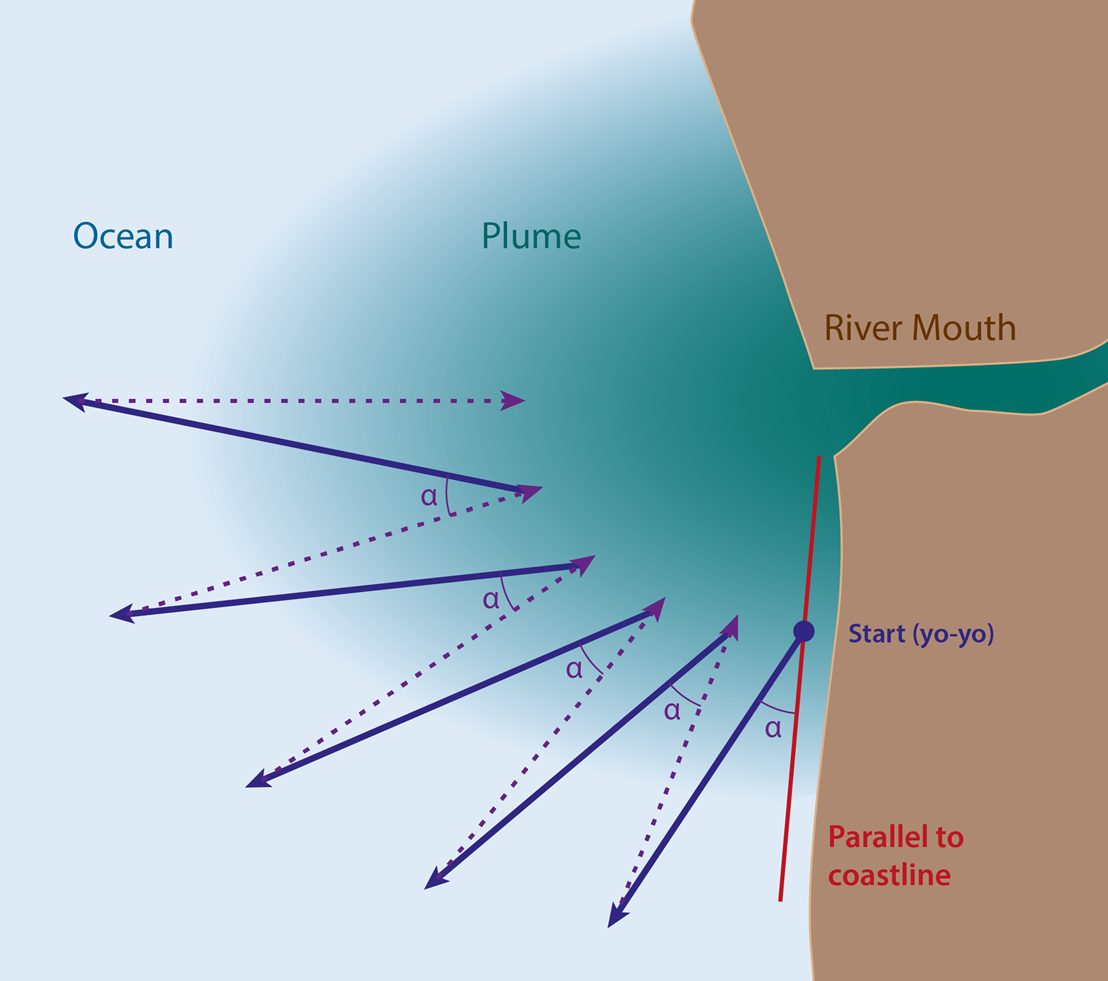
O algoritmo pode ser descrito da seguinte forma: O veículo começa por sair da boca do rio num padrão de dente de serra (para cima e para baixo na coluna de água). O veículo verifica se está dentro ou fora da pluma medindo a salinidade da superfície. Se o veículo atravessou a frente, ele inverte a sua direção, quer de volta para a foz do rio ou de saída num ângulo crescente para que circunde a pluma.
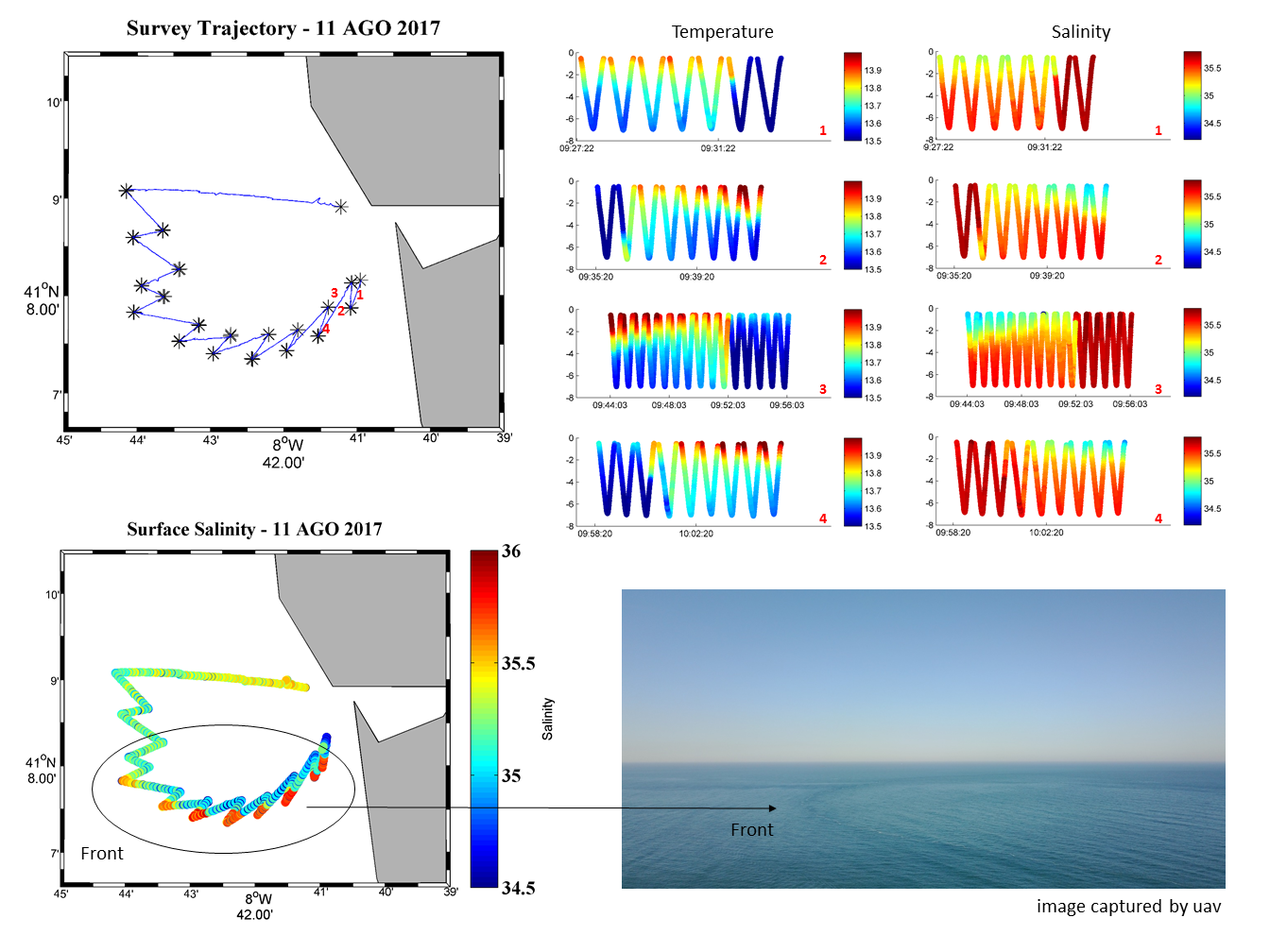
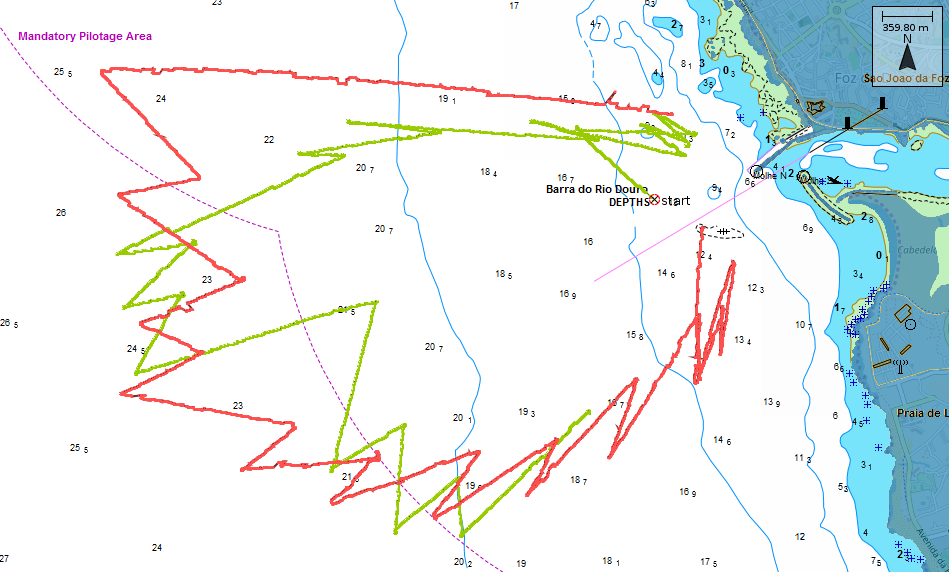
Vários testes de seguimento de plumas foram realizados na foz do rio Douro com investigadores do CIIMAR e LSTS. Usando um ou dois submarinos autónomos em conjunto com veículos aéreos, conseguimos mapear a pluma e obter sua estrutura 3D em simultâneo com passagens de satélite.
Referências:
-
J. Pinto, R. Mendes, J. C. B. da Silva, J. M. Dias and J. B. de Sousa, "Multiple Autonomous Vehicles Applied to Plume Detection and Tracking," 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, 2018, pp. 1-6.
- Beatriz Pinto, “Seguindo a pluma do Douro (foz acima, foz abaixo) com submarinos autónomos“, Jornal Publico 2017-08-18, edição online, 2017.
SNoW - Sado Nonlinear Internal Waves (Ondas internas não lineares do Sado)
Este cenário foi criado para estudar a geração de ondas internas não lineares no Estuário do Sado. As ondas internas desempenham um papel importante na transferência de calor, energia e de momento no oceano. A turbulência que produzem quando quebram é agora reconhecida como um aspecto vital da circulação meridional do oceano. Também desempenham um papel em aplicações de defesa, pois interagem com o ambiente de propagação acústica durante operações de detecção de minas e guerra anti-submarino, causando modificações no percurso de propagação das ondas sonoras e possivelmente revelando ou ocultando potenciais alvos, insonorizando uma área imprevisível.
Embora as ondas internas sejam um fenómeno conhecido, é um fenómeno bastante difícil de estudar devido à sua natureza esporádica e imprevisível.
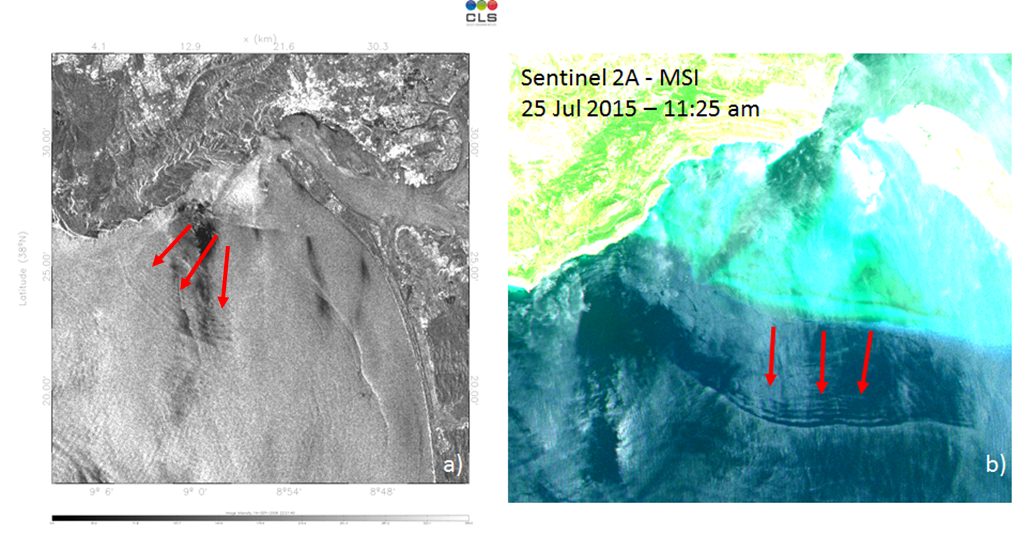
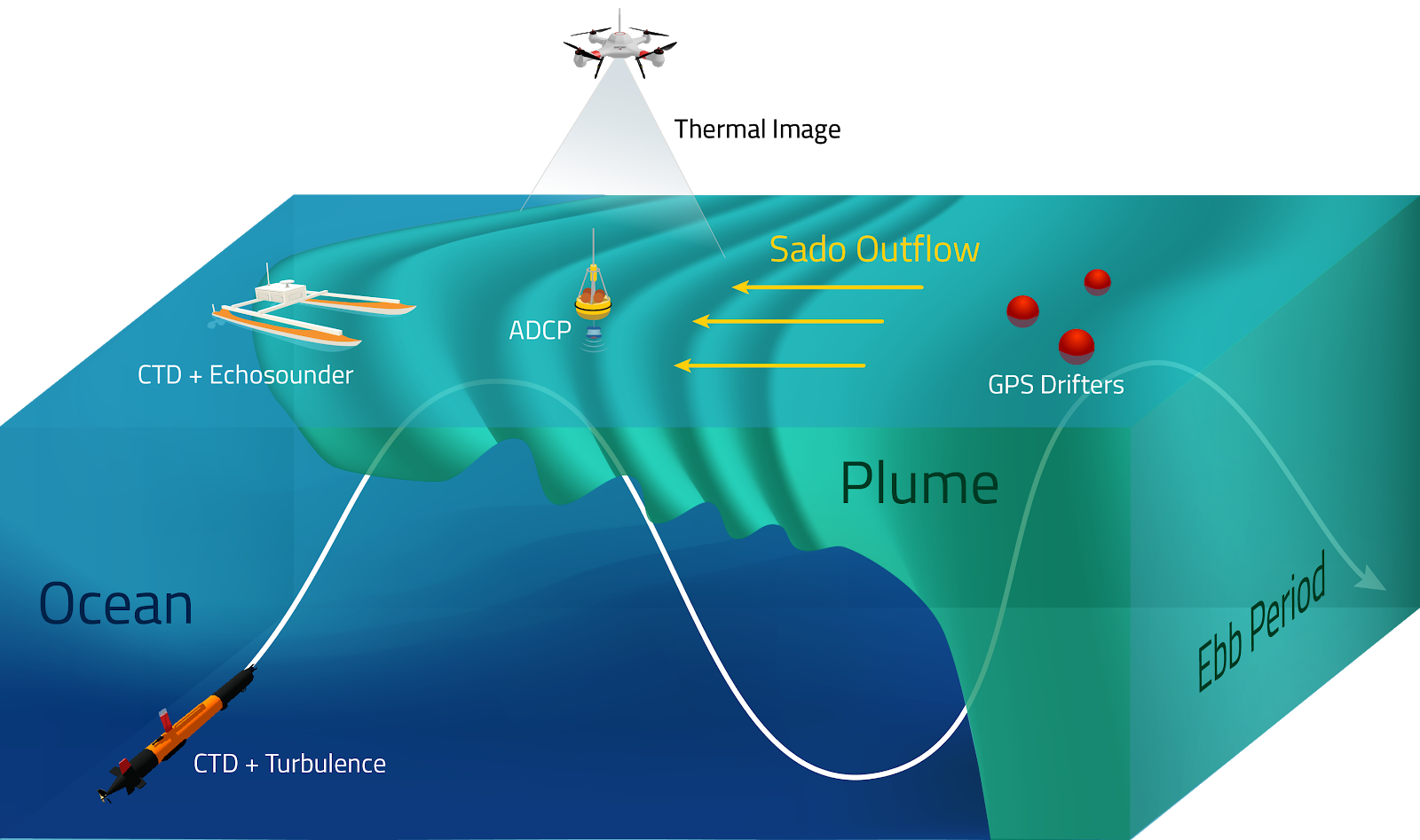
Esta missão realizou-se a sudeste do Portinho da Arrábida e englobou a aplicação de vários sistemas, para maximizar a qualidade de recolha de dados. Centra-se em observações únicas de ondas internas solitárias não-lineares (ISWs) na região de influência do escoamento estuarino do Sado utilizando instrumentação oceanográfica nova e emergente. Foram realizadas observações de alta resolução para estudar a estrutura vertical e superficial da frente, incluindo medições de velocidade, salinidade, temperatura da água, turbidez e backscatter óptico em toda a coluna de água, utilizando uma rede sinérgica entre LAUVs, Wavy's, UAVs, sensores fundeados e plataformas de deteção remotas.
Este cenário foi executado no REP17 e agora repetido no REP18. A repetição do evento permitiu superar alguns dos problemas que ocorreram durante as primeiras tentativas, principalmente com o tráfego marítimo. Os dados recolhidos contribuirão para uma melhor compreensão da geração de ondas internas não lineares na zona de influência do Estuário do Sado.
Colaboradores: LSTS, CIIMAR e CESAM.
Referências:
-
T. Marques, Lima, K., Ribeiro, M., Ferreira, A. Sérgio, Sousa, J. Borges, and Mendes, R., “Characterization of Highly Dynamic Coastal Environments, Employing Teams of Heterogeneous Vehicles: A Holistic Case Study”, in 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), 2018.
Savel - Sado Estuarine Outflow (Caudal da vazante do estuário do Sado)
Este cenário foi pensado para estudar o impacto da variabilidade das marés na estratificação costeira. O objetivo principal foi recolher dados hidrográficos (CTD) utilizando um AUV durante 5-6 dias ao longo de um transecto específico numa região próxima ao canal de navegação na foz do estuário do Sado, com o objetivo de estudar a estrutura vertical e a variabilidade em curtos períodos temporais da região de influência do escoamento do estuário do Sado no Verão e o impacto de águas estuarinas mais quentes na estratificação costeira.
Nesta missão, o AUV realizou um transecto ao longo de 13 horas contínuas. Ao fazer isso, os dados recolhidos abrangem um período completo de maré na secção selecionada do oceano (cerca de 12 horas e 25 minutos).
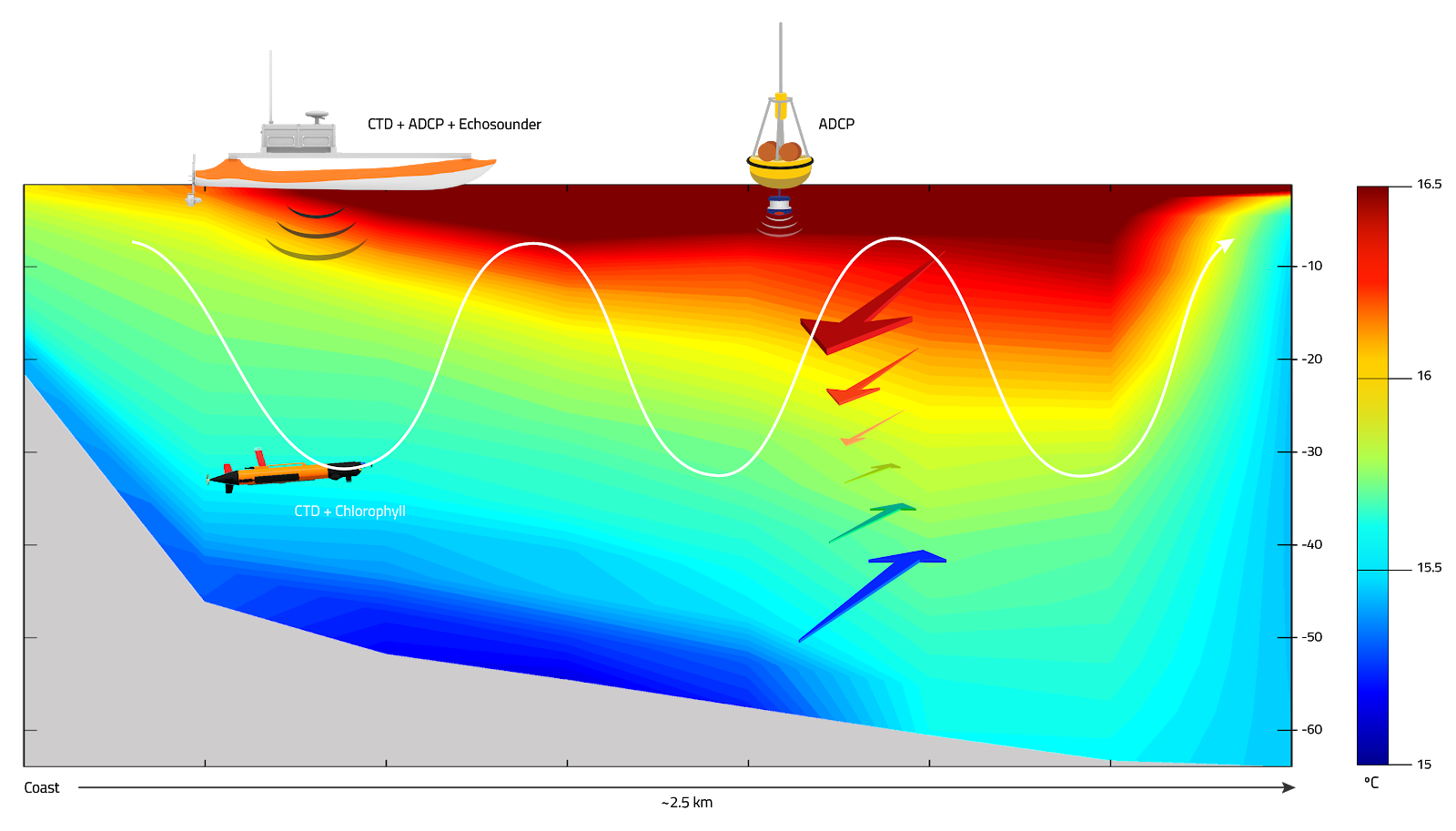
Este cenário demonstrou que os AUVs são uma boa solução para adquirir dados de alta resolução in-situ num ambiente operacional muito dinâmico. O conjunto de dados ambientais recolhidos pelos AUVs constitui uma base para novos estudos relativos ao Estuário do Sado e à sua região costeira adjacente. Resultados preliminares mostram que a temperatura do ar e a radiação solar influenciam claramente a estratificação local, aumentando a temperatura da água nas camadas superiores.
Este cenário foi executado no REP17 e agora repetido no REP18. Os dados recolhidos do REP18 ainda estão a ser analisados.

Colaboradores: LSTS, CIIMAR and CESAM.
Referências:
-
S. Cardigos, R. Mendes, A. S. Ferreira, J. Pinto, J. B. de Sousa, J. M. Dias, “Using AUVs to study estuarine outflow stratification under severe environmental constraints”, in 2018 IEEE OES Autonomous Underwater Vehicle Symposium - Porto, 2018.
-
T. Marques, Lima, K., Ribeiro, M., Ferreira, A. Sérgio, Sousa, J. Borges, and Mendes, R., “Characterization of Highly Dynamic Coastal Environments, Employing Teams of Heterogeneous Vehicles: A Holistic Case Study”, in 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), 2018.