Topic 1- Autonomous vehicles
Using autonomous vehicles for systematic acquisition of ocean physical data, not forgetting the issues related to the legal framework associated with this type of operation
DRiP - Douro River Plume Tracking
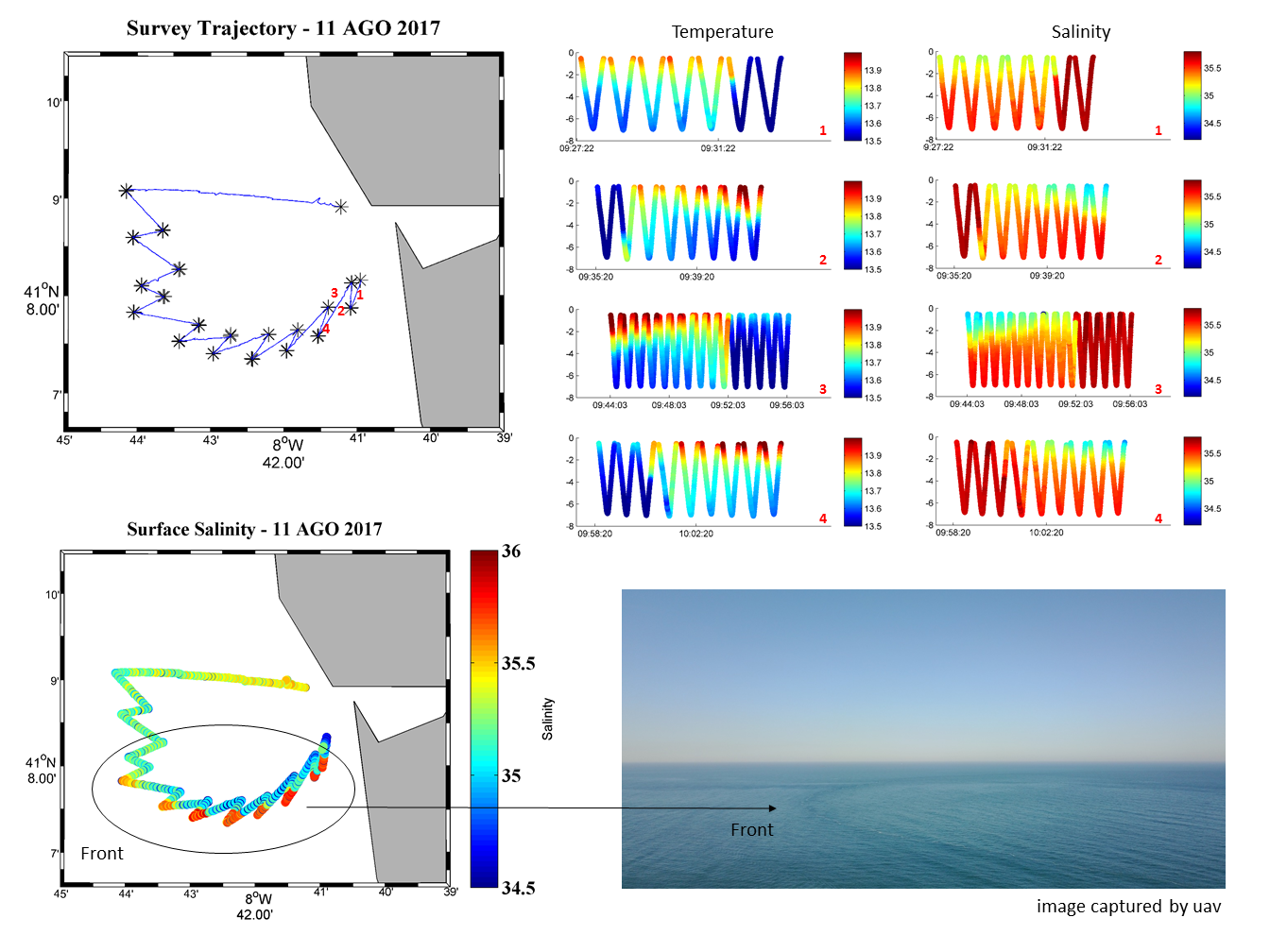
Relative low density riverine plume waters allows its surface expression to be observed both on satellite imagery and aerial footage. Access to satellite imagery, however, imposes a latency between capture and availability (of several hours) which, combined with the tidal movements and coastal ocean dynamics, disallows its use for tracking the front evolution. The available imagery is not always usable due to cloud coverage and the usable data is only from the superficial water layer. The underwater 3D structure of the plume, its thickness and variability remains object of modeling. As such, in the context of the MARINFO project, scientists from CIIMAR and LSTS have developed algorithms to detect and track river plumes autonomously using in situ measurements taken by AUVs.
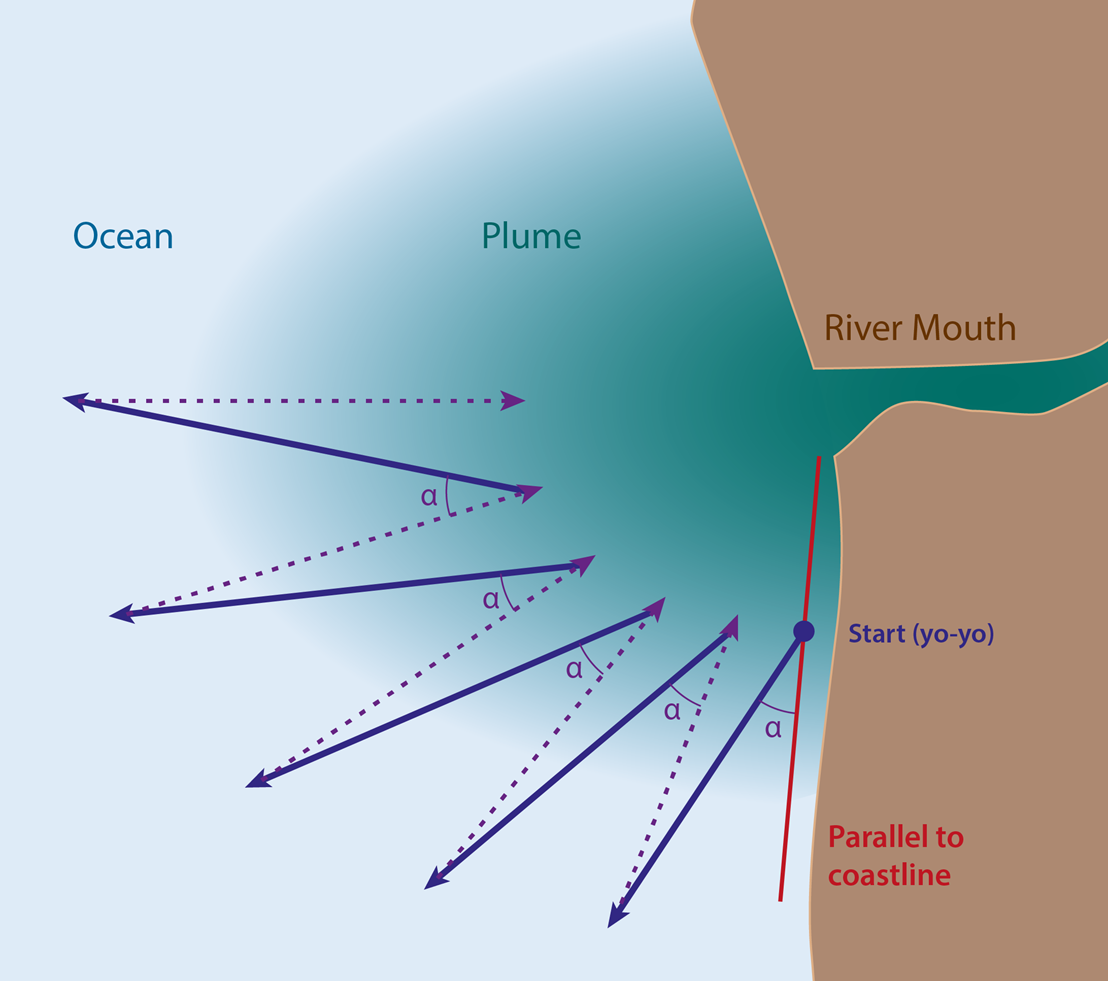
The algorithm can be described as follows: The vehicle starts by moving out of the river mouth in a saw-tooth (up and down the water column) pattern. Whenever it is close to the surface, the vehicle checks if it is either inside or outside the plume by measuring surface salinity. If the vehicle has traversed the front, it inverts its direction either back to the river mouth or outgoing in an increasing angle so that it incircles the plume.
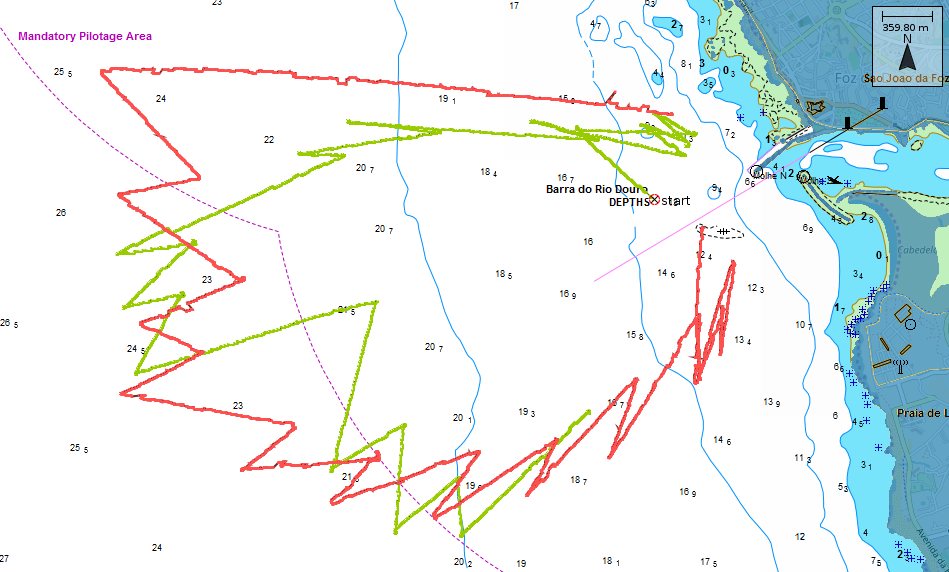
Several plume tracking tests have been performed in the outfall of Douro river with researchers from CIIMAR and LSTS. Using one or two autonomous submarines together with aerial vehicles we were able to map the plume and obtain its 3D structure simultaneously with satellite passages.
References:
-
J. Pinto, R. Mendes, J. C. B. da Silva, J. M. Dias and J. B. de Sousa, "Multiple Autonomous Vehicles Applied to Plume Detection and Tracking," 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, 2018, pp. 1-6.
- Beatriz Pinto, “Seguindo a pluma do Douro (foz acima, foz abaixo) com submarinos autónomos“, Jornal Publico 2017-08-18, edição online, 2017.
SNoW - Sado Nonlinear Internal Waves
This scenario was designed to study the generation of nonlinear internal waves in the Sado Estuary ROI. Internal waves play an important role in transferring heat, energy, and momentum in the ocean and the turbulence they produce when they break is now recognized as a vital aspect of the ocean's meridional overturning circulation. They also play a part in defense applications, since they interact with the acoustic propagation environment during mine detection and antisubmarine warfare operations, causing modifications on the path of propagating sound waves and possibly revealing or concealing potential targets by insonifying an unpredicted area.
Albeit internal waves are a known phenomenon, it’s a quite difficult phenomena to study due to their sporadic and unpredictable nature.
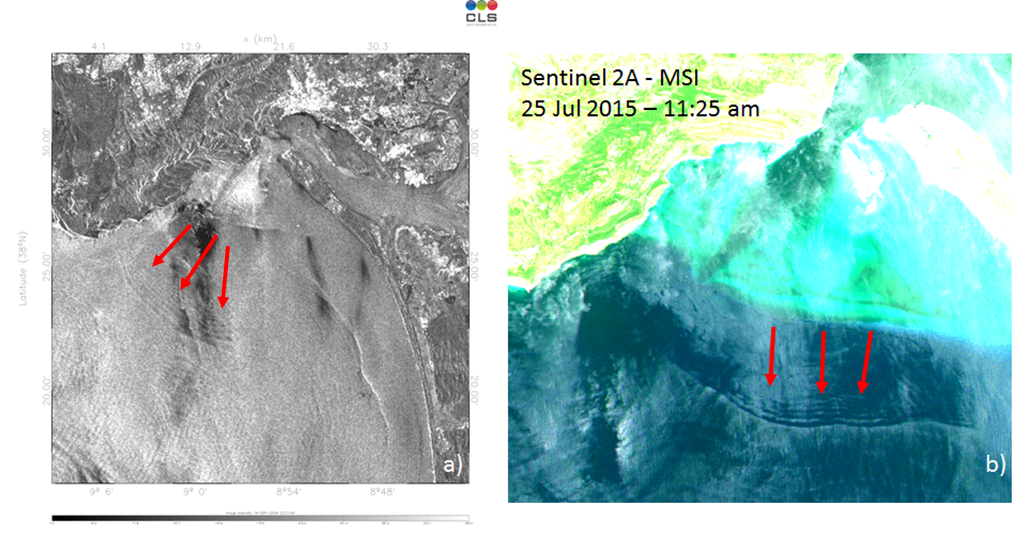
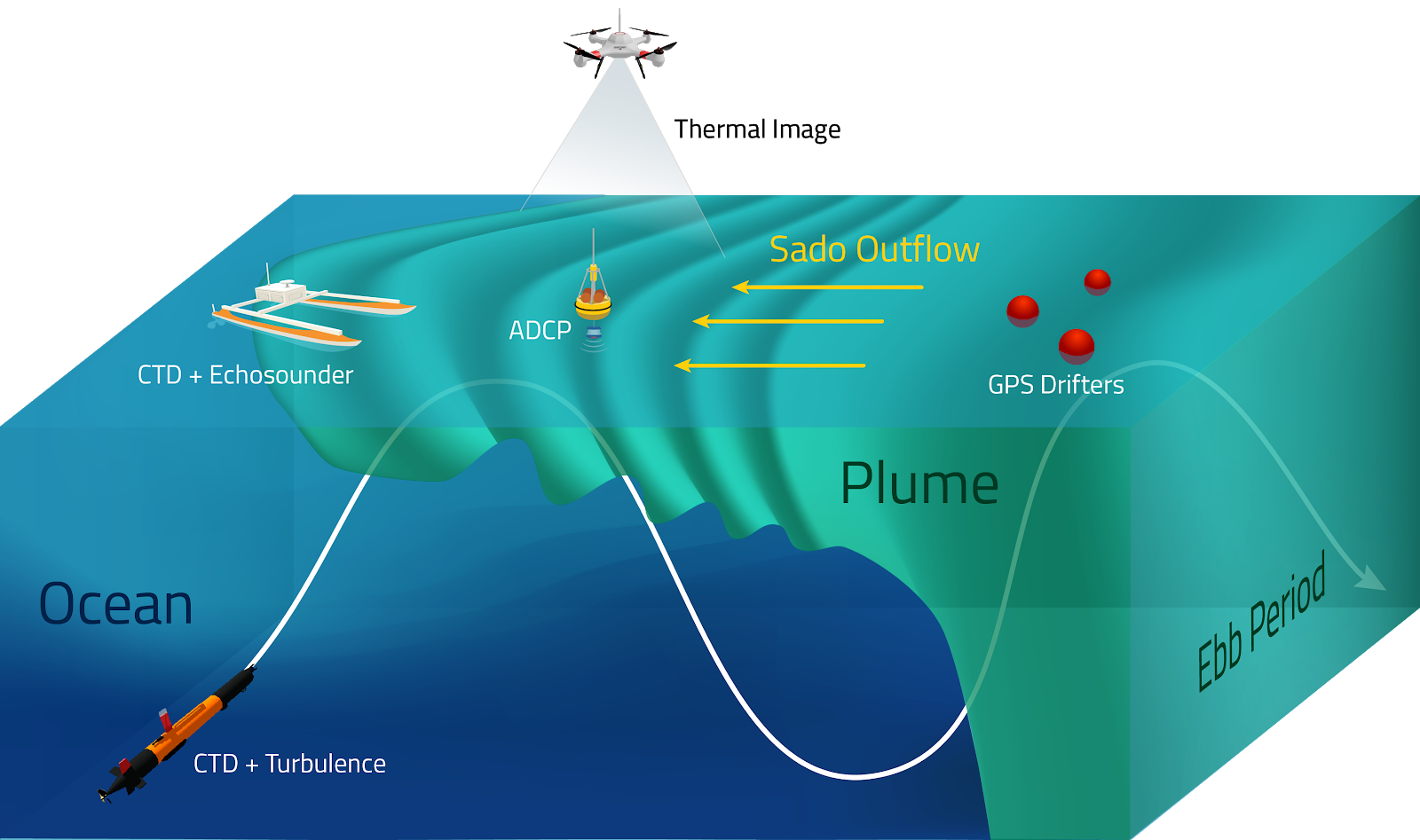
This mission took place south east from Portinho da Arrábida and encompassed multiple systems deployments, to maximize quality data collection. It centers on unique observations of nonlinear internal solitary waves (ISWs) in the region of influence of the Sado Estuarine outflow using new and emergent oceanographic instrumentation. High-resolution observations were carried out to study the front vertical and surface structure, including measurements of velocity, salinity, water temperature, turbidity and optical backscatter throughout the water column, using a synergetic network between LAUVs, Wavy’s, UAVs, moorings and remote sensing platforms.
This scenario was ran in REP17 and now repeated in REP18. The repetition of the event allowed to overcome some of the problems that appeared during the first trials, mostly with traffic. The collected data will contribute for a better understanding of the generation of nonlinear internal waves in the Sado Estuary ROI.
Collaborators: LSTS, CIIMAR and CESAM.
References:
-
T. Marques, Lima, K., Ribeiro, M., Ferreira, A. Sérgio, Sousa, J. Borges, and Mendes, R., “Characterization of Highly Dynamic Coastal Environments, Employing Teams of Heterogeneous Vehicles: A Holistic Case Study”, in 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), 2018.
Savel (Sado Estuarine Outflow)
This scenario was designed to study the impact of tidal variability on coastal stratification. The main objective was to collect hydrographic data (CTD) using an AUV during the course of 5-6 days along a specific transect in a region close to the navigation channel in the mouth of Sado estuary, in order to study the vertical structure and short-temporal variability of the region of influence of Sado estuary outflow during summer and the impact of warmer estuarine water in the coastal stratification.
In this mission, the AUV performed a transect over the course of 13 continuous hours. By doing so the data collected has the coverage of a full tidal period in the selected section of the ocean (about 12 hours and 25 minutes).
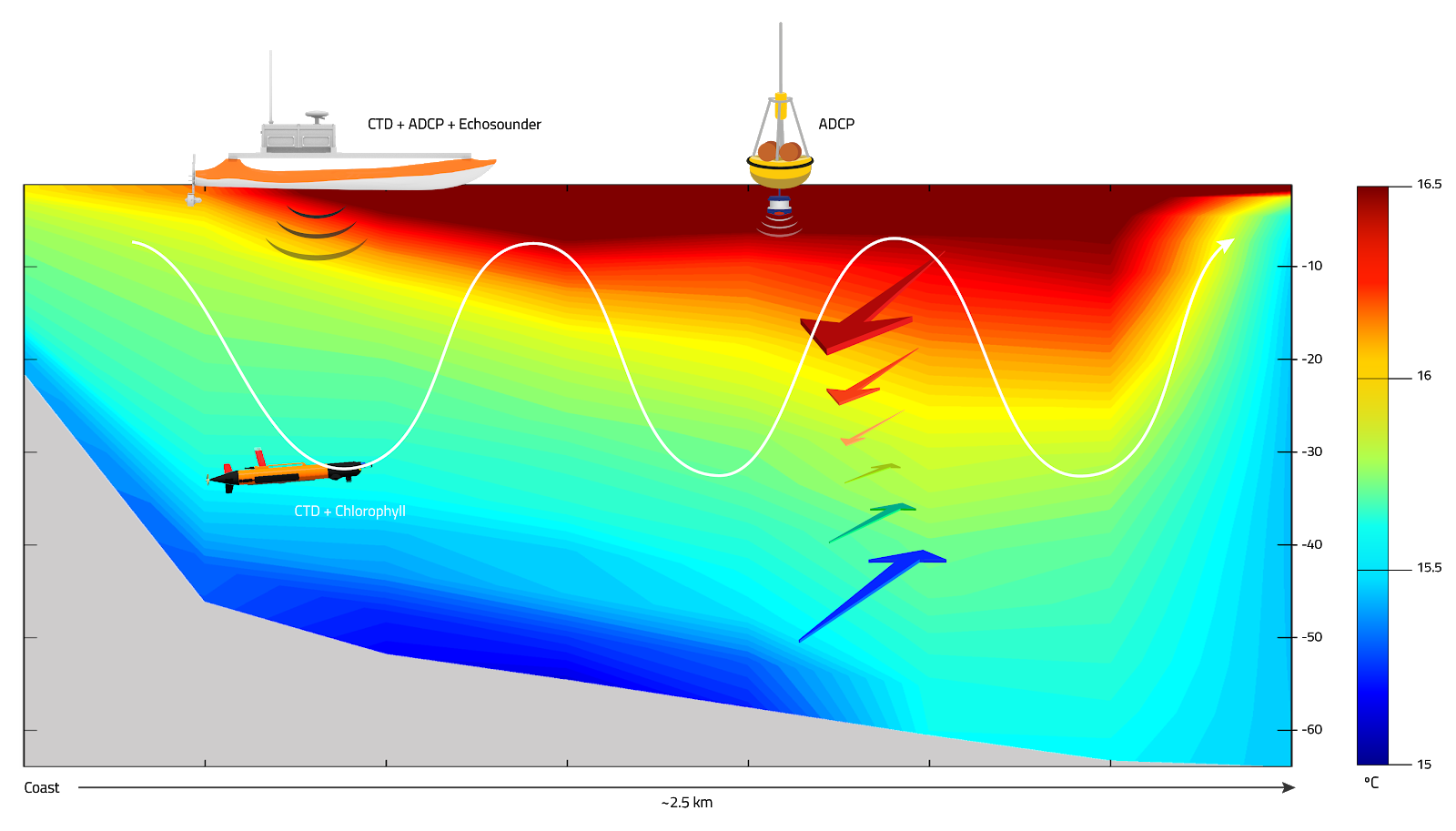
This use case demonstrated that AUVs are a good solution to acquire in situ high resolution data in a very dynamic operational environment. The environmental dataset collected by the AUVs constitute a base for new studies regarding the Sado Estuary and its adjacent coastal region. Preliminary results show that air temperature and solar radiation clearly influence the local stratification, increasing the water temperature at top layers.
This scenario was ran in REP17 and now repeated in REP18. REP18 collected data is still being analized.

Collaborators: LSTS, CIIMAR and CESAM.
References:
-
S. Cardigos, R. Mendes, A. S. Ferreira, J. Pinto, J. B. de Sousa, J. M. Dias, “Using AUVs to study estuarine outflow stratification under severe environmental constraints”, in 2018 IEEE OES Autonomous Underwater Vehicle Symposium - Porto, 2018.
-
T. Marques, Lima, K., Ribeiro, M., Ferreira, A. Sérgio, Sousa, J. Borges, and Mendes, R., “Characterization of Highly Dynamic Coastal Environments, Employing Teams of Heterogeneous Vehicles: A Holistic Case Study”, in 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), 2018.